Example ER1-Socialbot Interaction
The following dialog exemplifies what you can do:
Using with the ER1
You can link Socialbot to the ER1 robot by
Evolution Robotics. You speak through the microphone. Socialbot
processes your input and directs speech output through the ER1. You
can make the ER1 turn, move, open and close its gripper arm, respond
to obstacles detected by the IR sensors, and so on. Follow these
steps to get started:
- Launch ER1 Control Center and set to remove control (port 9000)
- Confirm a message in the ER1 Control Center report window saying it is "listening" for remote control
- Open Socialbot's config.txt file and set "robotics" to "yes" (if not already set.) Save and close.
- Launch Socialbot. It will interact with the ER1's API and send the message "I am ready" to be spoken
through the ER1. this may take a short as your computer loads voice/speech systems.
- When you hear a bell (or sometimes two when first starting), begin speaking into the microphone.
Your words will soon appear in the Socialbot window. Socialbot will generate a response to speak through the ER1.
- Continue.
Scripting for the ER1
You can script behaviors for the ER1
robot. For example:
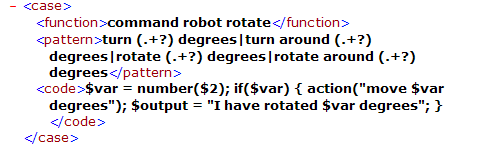
This behavior causes the ER1 robot to turn
a specified number of degrees upon command. The behavior is read
step-by-step. If the user inputs, "rotate 15 degrees" then here is what
the behavior does:
- matches the input with the grammar
structure "rotate X degrees"
- matches X to 15
- sends a command to the ER1 robot to
make the turn. Socialbot waits until the action is done before
continuing.
- optionally, we could add a command so it
remembers for future reference that the
last time it rotated, it did so by 15 degrees. (Not a necessary step,
but adds value.)
- selects output such as "I have turned
15 degrees"
In the event a behavior can't be executed,
Socialbot stops the behavior and moves on to something else. A behavior
might specify a routine of behaviors to be executed. Using the "action",
anything that the ER1 API can understand is possible.
Legal Notice
The approach described here for the Socialbot scripting
language is the exclusive property of Dario Nardi. It is illegal to use this approach for
any purpose other than with Socialbot without the express consent of Dario
Nardi.










